
жү«жҸҸдәҢз»ҙз ҒпјҢеҝ«йҖҹдёӢиҪҪжң¬еә”з”ЁиҜҙжҳҺж–ҮжЎЈпјҲе…Қиҙ№пјү

еӨ§е°Ҹпјҡ0KB
д»·ж јпјҡ0.00е…ғ
жӣҙж–°ж—Ҙжңҹпјҡ2016-07-07
ејҖеҸ‘иҖ…пјҡе°ҸR科жҠҖ
зәўеӨ–еҜ»иҝ№
-
- еә”з”ЁеҗҚз§°
- жүҖеұһеҲҶзұ»
- жӣҙж–°ж—¶й—ҙ
- з«ӢеҚідёӢиҪҪ
-
- зәўеӨ–еҜ»иҝ№
-
STMduino
- 2016-07-07
-
гҖҗзәўеӨ–еҜ»иҝ№гҖ‘ еә”з”Ёд»Ӣз»Қ
зәўеӨ–дј ж„ҹеҷЁеә”з”Ёе®һдҫӢ
е®һйӘҢжҰӮиҝ°пјҡ
йҖҡиҝҮзәўеӨ–дј ж„ҹеҷЁе®һзҺ°е°ҸиҪҰзҡ„еҫӘиҝ№еҠҹиғҪгҖӮ
еһӢеҸ·:E18-D50NK
иҝҷжҳҜдёҖз§ҚйӣҶеҸ‘е°„дёҺжҺҘ收дәҺдёҖдҪ“зҡ„е…үз”өдј ж„ҹеҷЁгҖӮжЈҖжөӢи·қзҰ»еҸҜд»Ҙж №жҚ®иҰҒжұӮиҝӣиЎҢи°ғиҠӮ1гҖӮиҜҘдј ж„ҹеҷЁе…·жңүжҺўжөӢи·қзҰ»иҝңгҖҒеҸ—еҸҜи§Ғе…үе№Іжү°е°ҸгҖҒд»·ж јдҫҝе®ңгҖҒжҳ“дәҺиЈ…й…ҚгҖҒдҪҝз”Ёж–№дҫҝзӯүзү№зӮ№пјҢеҸҜд»Ҙе№ҝжіӣеә”з”ЁдәҺжңәеҷЁдәәйҒҝйҡңгҖҒжөҒж°ҙзәҝ计件зӯүдј—еӨҡеңәеҗҲгҖӮ
з”өеҷЁзү№жҖ§пјҡ
U:5VDC
I:100mA
Sn:3-50CM
е°әеҜёпјҡ
зӣҙеҫ„:17MM
дј ж„ҹеҷЁй•ҝеәҰ:45MM
еј•зәҝй•ҝеәҰ:45CM
еә”з”Ёпјҡ
1гҖҒз”ҹдә§зәҝиҙ§зү©иҮӘеҠЁи®Ўж•°и®ҫеӨҮ
2гҖҒеӨҡеҠҹиғҪжҸҗйҶ’еҷЁ
3гҖҒиө°иҝ·е®«жңәеҷЁдәә
 е®һйӘҢеҺҹзҗҶпјҡ
е®һйӘҢеҺҹзҗҶпјҡ
еңЁиҪҰеӨҙе®үиЈ…дҝ©дёӘеһӮзӣҙеҗ‘дёӢзҡ„зәўеӨ–йҒҝйҡңжЁЎеқ—пјҢдҪңдёәжҺўжөӢй»‘зәҝзҡ„дј ж„ҹеҷЁпјҢеҪ“дј ж„ҹеҷЁиҝ”еӣһзҡ„з”өе№ідёә0ж—¶пјҢиЎЁжҳҺжҳҜжӯЈеёёең°йқўпјҢеҪ“дј ж„ҹеҷЁиҝ”еӣһзҡ„з”өе№іжҳҜ1ж—¶пјҢиЎЁжҳҺжҳҜй»‘зәҝгҖӮд»ҺиҖҢж №жҚ®дҝ©дёӘзәўеӨ–жҺўеӨҙзҡ„зҠ¶жҖҒпјҢжқҘеҲӨж–ӯиҪҰеӨҙзҡ„зҠ¶жҖҒжҳҜеӨ„дәҺй»‘зәҝзҡ„дҪ•з§ҚдҪҚзҪ®пјҢеҶҚеҜ№иҪҰиә«иҝӣиЎҢж–№еҗ‘ж ЎеҮҶпјҢжҜҸдёҖж¬ЎзЁӢеәҸеҫӘзҺҜйғҪдјҡиҝӣиЎҢдёҖж¬Ўж–№еҗ‘ж ЎеҮҶпјҢзӣҙиҮіе°ҸиҪҰдёҖиҮҙдҝқжҢҒдёҺй»‘зәҝе№іиЎҢзҡ„зҠ¶жҖҒиҝӣиҖҢдј ж„ҹеҷЁдёҚдјҡиў«и§ҰеҸ‘гҖӮ
 е®һйӘҢжӯҘйӘӨ
е®һйӘҢжӯҘйӘӨ
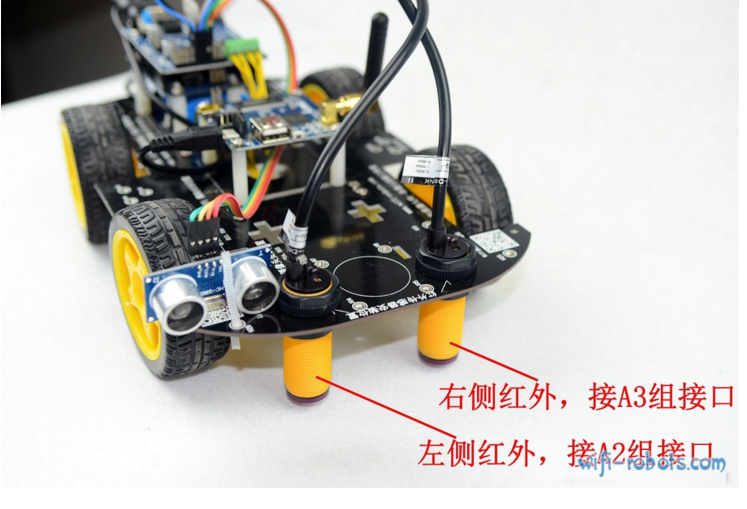
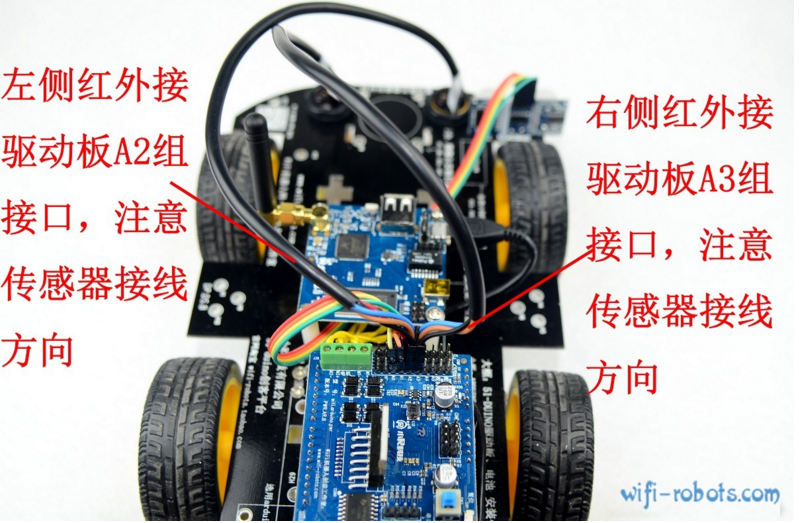
1.е°Ҷе·Ұиҫ№зәўеӨ–дј ж„ҹеҷЁзҡ„дёүдёӘеј•и„ҡжҺҘеҲ°STMduinoз”өжәҗжқҝзҡ„A2жҺҘеҸЈпјҢеҸіиҫ№зҡ„жҺҘеҲ°A3жҺҘеҸЈ пјҲзәўеӨ–дј ж„ҹеҷЁжңүй»‘жЈ•и“қдёүдёӘзәҝпјҢй»‘иүІжҳҜжҺҘIOпјҢжЈ•иүІжҳҜ5VпјҢи“қиүІжҳҜGNDпјүгҖӮ
2.зҺ°еңЁи°ғиҠӮзәўеӨ–дј ж„ҹеҷЁзҡ„зҒөж•ҸеәҰпјҡеңЁиҪҰеӨҙе®үиЈ… 2 дёӘеһӮзӣҙеҗ‘дёӢзҡ„зәўеӨ–йҒҝйҡңжЁЎеқ—пјҢжЁЎеқ—еҸ‘е°„еӨҙи·қзҰ»ең°йқўзәҰ 2cmпјҢи°ғж•ҙзәўеӨ–йҒҝйҡңжЁЎ
еқ—зҡ„зҒөж•ҸеәҰпјҢдҪҝд№ӢжӯЈеҘҪеңЁеҜ№зқҖй»‘зәҝзҡ„ж—¶еҖҷпјҢдј ж„ҹеҷЁе°ҫйғЁзҡ„жҢҮзӨәзҒҜзҶ„зҒӯпјҢеҜ№зқҖжӯЈеёёең°йқўж—¶дә®иө·гҖӮ
 иҪҜ件解жһҗ
иҪҜ件解жһҗ
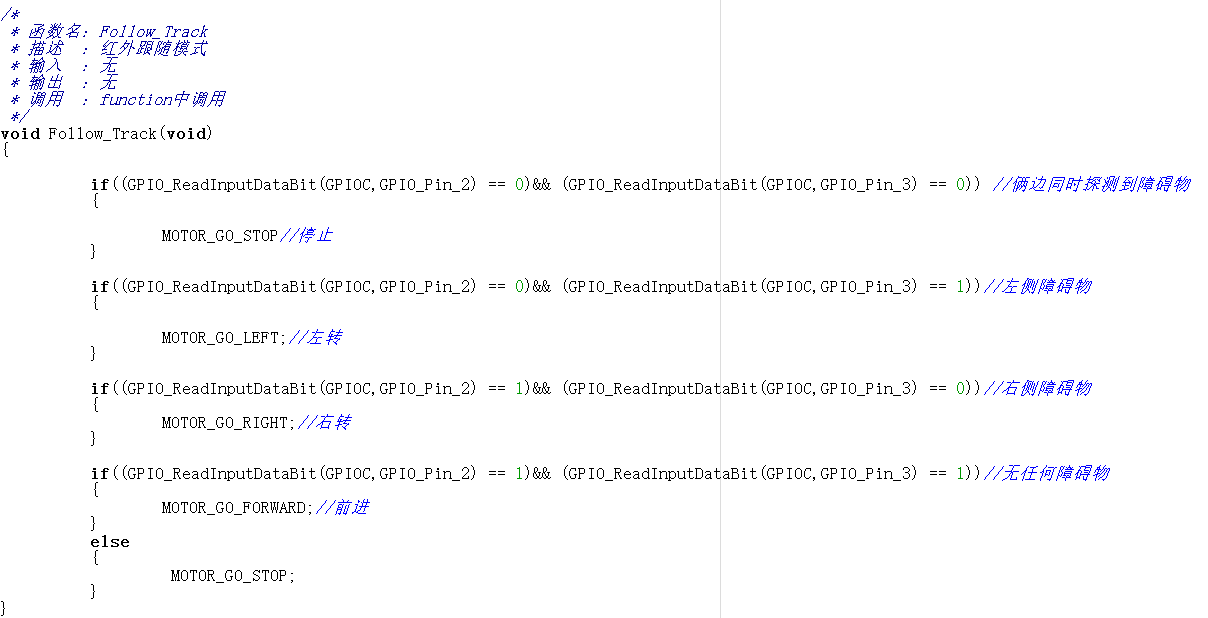
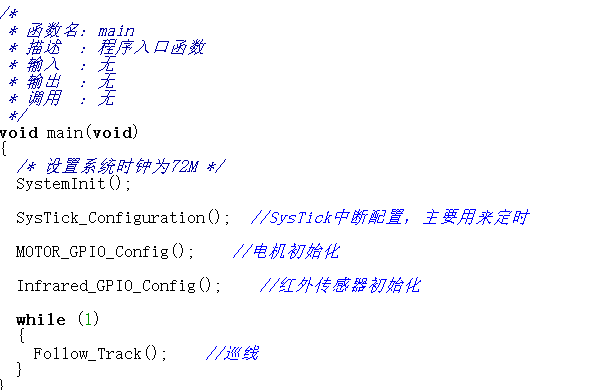
д»Јз ҒдёӯеҸҜд»ҘзңӢеҲ°еҚ•зүҮжңәеҲқе§ӢеҢ–зӣёе…ізҡ„еҮҪж•°еҗҺе°ұдјҡдёҖзӣҙжү§иЎҢFlollowLine()иҝҷдёӘеҮҪж•°пјҢеҚ•зүҮжңәе°ұдёҖзӣҙеӨ„дәҺеҫӘзҺҜжЈҖжөӢзәўеӨ–зҠ¶жҖҒпјҢ然еҗҺж №жҚ®дёҠйқўжүҖиҜҙзҡ„еҺҹзҗҶпјҢиөӢдәҲе°ҸиҪҰдёҚеҗҢзҡ„зҠ¶жҖҒж–№еҗ‘
 еә”з”Ёжү©еұ•
еә”з”Ёжү©еұ•
зәўеӨ–дёҚд»…д»…еҸӘеҸҜд»Ҙз”ЁжқҘе·ЎзәҝпјҢеҗҢж—¶еҸҜд»Ҙз”ЁжқҘйҒҝйҡңпјҢиҝҷз§Қж–№ејҸжҜ”и¶…еЈ°жіўиҰҒз®ҖеҚ•зЁіе®ҡпјҢе”ҜдёҖ зҡ„зјәзӮ№е°ұжҳҜдёҚеҸҜд»ҘзІҫзЎ®и®ҫзҪ®йҒҝйҡңи·қзҰ»гҖӮйҷӨжӯӨд№ӢеӨ–зәўеӨ–еҸҜд»Ҙиҝҗз”Ёе®ғзҡ„еҺҹзҗҶеҸҚеҗ‘еә”з”ЁпјҢз”ЁжқҘеҜ»йҡңпјҢеҶҚиҪҰдёҠиЈ…дёҠ3дёӘзәўеӨ–йҒҝйҡңжЁЎеқ—еҲҶеҲ«жЈҖжөӢдёүдёӘж–№еҗ‘дёҚеҗҢзҡ„йҡңзўҚзү©пјҢеҪ“жңүйҡңзўҚзү©йқ иҝ‘ж—¶е°ұеҒңжӯўпјҢжІЎжңүйҡңзўҚзү©ж—¶е°ұеүҚиҝӣгҖӮеӨ§е®¶еҰӮжңүе…ҙи¶Јзҡ„иҜқеҸҜд»Ҙз…§зқҖиҝҷдёӘеҺҹзҗҶеҶҷд»Јз Ғеҗ§пјҒ