扫描二维码,快速下载本应用说明文档(免费)
【巡线遁迹】 应用介绍
红外传感器应用实例
实验概述:
通过红外传感器实现小车的循迹功能。
型号:E18-D50NK
这是一种集发射与接收于一体的光电传感器。检测距离可以根据要求进行调节1。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。
电器特性:
U:5VDC
I:100mA
Sn:3-50CM
尺寸:
直径:17MM
传感器长度:45MM
引线长度:45CM
应用:
1、生产线货物自动计数设备
2、多功能提醒器
3、走迷宫机器人
实验原理:
在车头安装俩个垂直向下的红外避障模块,作为探测黑线的传感器,当传感器返回的电平为0时,表明是正常地面,当传感器返回的电平是1时,表明是黑线。从而根据俩个红外探头的状态,来判断车头的状态是处于黑线的何种位置,再对车身进行方向校准,每一次程序循环都会进行一次方向校准,直至小车一致保持与黑线平行的状态进而传感器不会被触发。

一、实验步骤
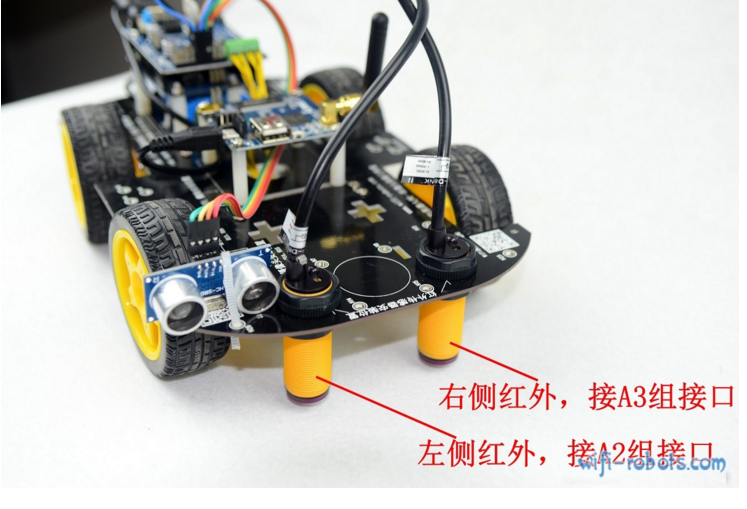
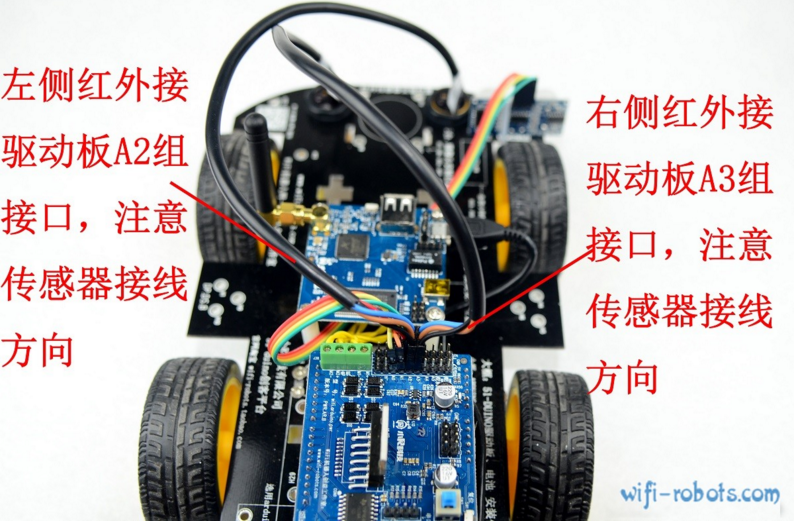
1.将左边红外传感器的三个引脚接到arduino电源板的A2接口,右边的接到A3接口 (红外传感器有黑棕蓝三个线,黑色是接IO,棕色是5V,蓝色是GND)。
2.现在调节红外传感器的灵敏度:在车头安装 2 个垂直向下的红外避障模块,模块发射头距离地面约 2cm,调整红外避障模块的灵敏度,使之正好在对着黑线的时候,传感器尾部的指示灯熄灭,对着正常地面时亮起。
二、软件解析
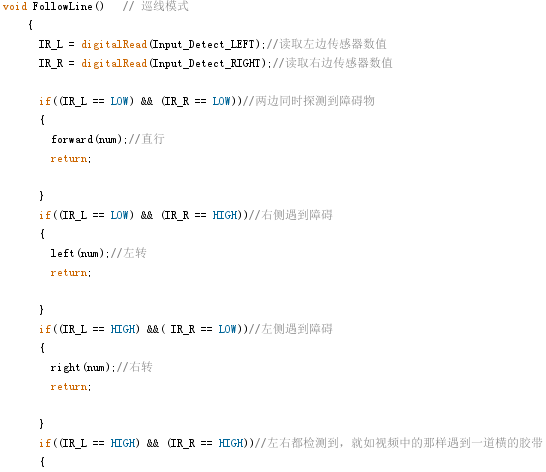
打开arduino IDE可以看到巡线模式的代码,巡线模式的切换命令为FF130200FF(没有可以添加自定义命令)

代码中可以看到当发送巡线命令切换模式后单片机就会一直执行FlollowLine()这个函数,单片机就一直处于循环检测红外状态,然后根据上面所说的原理,赋予小车不同的状态方向
三、应用扩展
红外不仅仅只可以用来巡线,同时可以用来避障,这种方式比超声波要简单稳定,唯一 的缺点就是不可以精确设置避障距离。除此之外红外可以运用它的原理反向应用,用来寻障,再车上装上3个红外避障模块分别检测三个方向不同的障碍物,当有障碍物靠近时就停止,没有障碍物时就前进。大家如有兴趣的话可以照着这个原理写代码吧!
网友评论仅供网友表达个人看法,并不表明 小R科技 Robots-Store机器人应用商城 同意其观点或证实其描述
昵称: 验证码: 